
Автоматическая корректировка направления лучей фар

Первоначальная регулировка направления световых пучков фар производится для неподвижного не нагруженного автомобиля с точностью до 0,5°, так как более высокая точность в условиях эксплуатации практически недостижима.
Но фары монтированы на кузове, положение которого изменяется за счет прогиба рессор при изменении нагрузки автомобиля и под влиянием реактивных сил, возникающих при разгоне и торможении. Кроме того, кузов совершает колебания при движении по неровной дороге. Изменения положения продольной оси кузова автомобиля составляют:
при изменении нагрузки (пассажиры на заднем сидении или груз на платформе грузового автомобиля) 0,5—1°;
при резком разгоне и торможении автомобиля (кратковременно) 3—4°;
амплитуда колебаний при движении по плохой дороге 1—2° выше.
Европейская система ближнего света с резкой светотеневой границей особенно чувствительна к таким изменениям наклона осей фар. Изменение наклона на 1° (tg 1°=0,0175) соответствует для расстояния 50 м перемещению светотеневой границы на 0,85 м по вертикали. Поэтому в европейских странах появилось много патентов на ручные и автоматические системы, позволяющие корректировать направление лучей фар в зависимости от упомянутых выше- возмущающих факторов.
Проще всего решается ручная корректировка направления лучей фар в зависимости от изменения нагрузки автомобиля.. При нагрузке легкового автомобиля пассажирами на заднем сидении или грузового автомобиля грузом, помещенным на платформе кузова, положение осей фар отклоняется вверх за счет прогиба задних рессор; это отклонение должно быть компенсировано соответствующим увеличением наклона осей фар вниз от исходного положения, соответствующего не нагруженному автомобилю.
Для этой цели оптические элементы фар выполняются поворачивающимися вокруг горизонтальной оси и фары снабжаются устройством, позволяющим дополнительно наклонить их оптические элементы вниз на необходимый угол. Управление дополнительным наклоном оптических элементов фар размещается либо на самой фаре, либо в кабине водителя. В последнем случае привод от кнопки или ручки управления к фарам может быть механическим (тягой или тросом), гидравлическим или электрическим. Такие устройства обычно позволяют изменять наклон осей фар в пределах от 0,5 до 2,5% (наклон в процентах измеряется тангенсом угла наклона), и рукоятки управления часто снабжаются делениями или упруго фиксирующимися положениями через 1 или 0,5%. На рис. 1-33 изображено одно из таких ручных устройств, управляемых гидравлической передачей из кабины водителя.
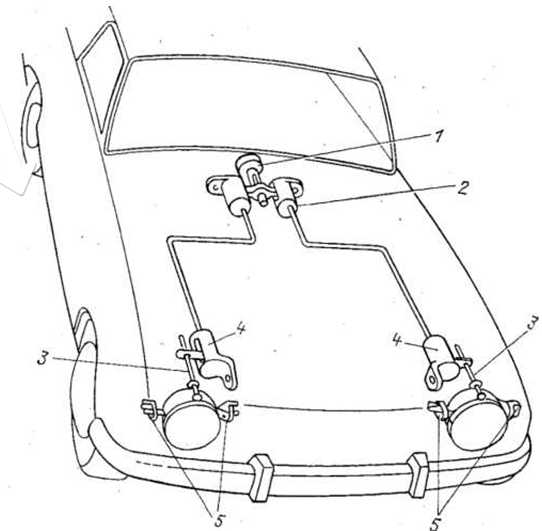
Рис. 1-33. Устройство для ручной корректировки наклона фар.
1 — поворотная кнопка управления; 2 — управляющие гидравлические цилиндры; 3 — регулируемый шток привода к фаре; 4 — исполнительные гидравлические цилиндры; 5 — оси качания фар.
Корректировка и стабилизация направления лучей фар при торможении, разгоне и колебаниях кузова автомобиля требует уже применения автоматических систем. Подавляющее большинство таких систем основано на принципе изменения расстояний точек кузова относительно передней и задней осей и суммирования сигналов от датчиков этих перемещений. Таким образом, эти системы удерживают неизменное положение оптической оси фар по отношению к поверхности дорожного полотна. На рис. 1 -34 приведена одна из таких систем французской фирмы «Сибье» с гидравлической передачей фарам перемещений передней и задней осей относительно кузова.
На кузове укреплены гидравлические цилиндры 1 и 2 датчиков перемещений; их поршни связаны тягами и шарнирными рычагами с передней и задней осями таким образом, что вертикальные перемещения передней и задней осей перемещают поршни соответствующих цилиндров в противоположных направлениях. Следовательно, па исполнительные цилиндры 3 к 4, связанные с фарами, воздействует разность давлений (пропорциональная разности перемещений осей) и наклон фар изменяется в обратном направлении по отношению к изменению положения продольной оси автомобиля.
Подобная система сохраняет неизменное положение оптических осей фар по отношению к поверхности дороги при изменениях положения продольной оси кузова автомобиля, вызванного любой причиной: нагрузкой кузова, разгоном и торможением автомобиля и колебаниями кузова при движении автомобиля по неровной и разбитой дороге.
По описанному принципу разработаны десятки различных автоматических систем с механической, гидравлической, пневматической и электрической передачей сигнала датчиков исполнительному органу. Однако стоимость их довольно высока, и они пока применяются только на автомобилях высокого класса. По-видимому, из технико-экономических соображений следует отдать предпочтение системам с гидравлической передачей управляющего сигнала исполнительному органу.
Однако все эти системы, как было уже сказано, стабилизируют направление лучей фар по отношению к поверхности дорожного полотна. Следовательно, их правильное действие обеспечено лишь на прямолинейных участках продольного профиля дороги. При встречном разъезде автомобилей на переломах продольного профиля описанные автоматические системы не обеспечивают хорошего освещения: на холме встречные автомобили слепят друг друга, а в ложбине освещение дороги перед ними резко ухудшается.
В литературе также высказываются мнения о желательности разработки единой системы ближнего не слепящего света, объединяющей преимущества американской и европейской систем и смягчающей их недостатки.
- Электрическая масса автомобиля
- Диоды в генераторе автомобиля
- Современные нормы светораспределения головных фар
- Обозначение электрооборудования
- Неисправности электропроводки автомобиля
- Американские нормы для фар
- Система освещения автомобиля
- Приборы, обязательные для некоторых видов автомобилей
- Европейские нормы для фар
- Регулировка прерывателя контактов
- Прерыватель распределителя зажигания
- Регуляторы опережения зажигания
- Аккумуляторная батарея, требующая малого технического обслуживания
- Получение высокого напряжения
- Принцип работы автомобильного генератора
- Состав и размещение световых приборов на автомобиле
- Генератор Холла
- Типы автомобильных ламп
- Конструкция и размещение световых приборов
- Цепи зажигания
- Нормируемые параметры ГОСТ световых приборов
- Световые приборы по нормам США
- Маркировка автомобильных ламп
- Электронные системы зажигания
- Техническое обслуживание аккумуляторных батарей
- Конструкция генератора
- Свечи зажигания автомобиля
- Обычные аккумуляторные батареи
- Катушки зажигания и свечи
- Свинцовая аккумуляторная батарея
- Система зажигания двигателя
- Автоматическая корректировка направления лучей фар
- Установка зажигания
- Проблемы запуска двигателя
- Оптический генератор
- Опережение зажигания двигателя
- Европейская экономическая комиссия при ООН по стандартам автомобильных фар
- Работа генератора автомобиля
- Магнитный потока генератора
- Системы управления двигателем
- Электрооборудования автомобиля
- Требования к светосигнальным приборам автомобиля
- Принцип работы системы зажигания
- Начальный период нормирования автомобильных световых приборов в Европе
- Международные организации по нормированию и стандартизации освещения
- Техническое обслуживание системы зажигания
- Регулировка фар автомобиля
- Нормы США для оптических элементов автомобиля
 Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...
Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...