
Рулевое управление аккермана
Многие недостатки системы с качающимися осями были преодолены в 1817 году, когда мюнхенский каретный мастер по имени Ланкеншпергер изобрел систему с фиксированной осью, с двумя поворотными точками. В 1818 году его агент в Англии, Рудольф Аккерман взял патент на систему, которая известна в настоящее время как конструкция Аккермана и широко используется в настоящее время.
Рулевое управление должно устанавливать колеса под углами, как изображено на рис. 15.2. В 1878 году Жанто показал, что при выполнении этого условия износ шин будет минимальным. На рисунке показано, что разница углов поворота передних колес зависит от соотношения T/W. Конструкция Аккермана не вполне удовлетворяла условиям Жанто при любом положении колес, обычно это условие в точности выполнялось только тогда, когда колеса были направлены прямо и в одном положении при левом и при правом повороте.
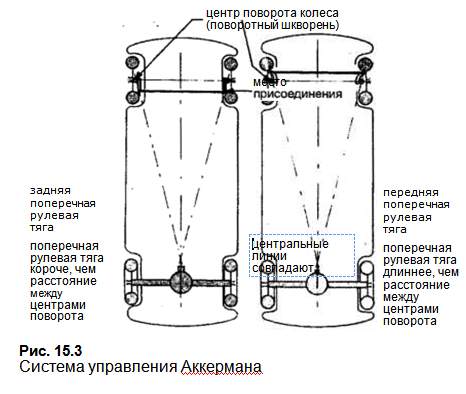
Основные детали конструкции изображены на рис. 15.3. Каждая ступица колеса монтируется на поворотной цапфе, которая при поворотах автомобиля поворачивается или на шаровых шарнирах, или на поворотном шкворне. Система рычагов, соединяющих две поворотные цапфы друг с другом, включает в себя два рычага рулевых тяг и поперечную рулевую тягу. В конструкции Аккермана поворотный шкворень (или шкворневые шарниры) и шарнир поперечной рулевой тяги располагаются на воображаемой линии, которая располагается под углом к средней линии автомобиля. Это означает, что поперечная рулевая тяга присоединена к задним частям поворотных центров, она будет короче, чем расстояние между поворотными центрами. Хотя это условие выполняется на грузовиках, оно не выполняется на легковых автомобилях: вместо этого поперечная рулевая тяга располагается впереди центров колес.
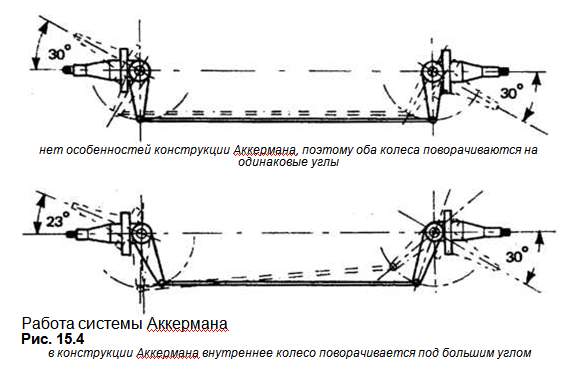
На рис. 15.4 показаны углы поворотов, когда длина поперечной рулевой тяги равна расстоянию между поворотными центрами; оба колеса должны перемещаться под одинаковым углом. Установка рычагов рулевой тяги и укорочение поперечной рулевой тяги дает конструкцию Аккермана, благодаря чему углы будут изменяться при повороте колес. Это можно видеть, если поперечная рулевая тяга перемещается на заданное расстояние влево: левый рычаг рулевой тяги достигает своего эффективного угла поворота (поперечная рулевая тяга и рычаг рулевой тяги располагаются под углом 90°), это обеспечивает рычагу рулевой тяги небольшое угловое перемещение, тогда как с правой стороны рычаг рулевой тяги уходит от положения эффективного угла поворота и увеличивает угол между рычагом и колесом. Разница углов между двумя колесами увеличивается при еще большем повороте колес.
Следует отметить, что важной особенностью этой системы является положение места соединения рычага рулевой тяги по отношению к поворотным осям, а не форма рычагов рулевых тяг. Однако деформация рычагов рулевых тяг из-за удара автомобиля приведет к нарушению геометрии и неправильному углу поворота колес. Геометрию рычагов рулевых тяг можно проверить путем постановки колес на поворотные платформы и измерения углов, или путем проверки того, на какую величину поворачиваются колеса от параллельного положения, если одно колесо поворачивается при помощи рулевого управления на заданный угол — этот тест называется тестом на расхождение при повороте.
 Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...
Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...