
Привод рулевого управления
Хорошо известно, что взаимная регулировка геометрии передних и задних колес существенно влияет на курсовую устойчивость автомобиля. Это ясно проявляется при износе втулок подвески; часто курсовая неустойчивость приводит к возникновению опасных ситуаций при движении автомобиля.
До середины 1950-х годов большинство автомобилей имели недостаток в виде избыточной поворачиваемости; основной причиной этого состояния было неконтролируемое перемещение заднего моста из-за деформации пружины, вызванной креном кузова. В результате имелись опасности, связанные с избыточной поворачиваемостью, поэтому большинство современных автомобилей для улучшения стабильности конструируются таким образом, чтобы они имели некоторую недостаточную поворачиваемость при движении с высокой скоростью.
Одним из шагов для получения характеристик недостаточной поворачивамости является использование перемещения кузова при его крене для «управления» задними колесами. Это достигается или путем разрегулирования заднего моста, или, в случае наличия независимой задней подвески, использованием изменения геометрии системы подвески.
Хотя улучшение безопасности путем повышения стабильности связано с недостаточной поворачиваемостью, это состояние увеличивает управляющее усилие, которое должно прикладываться водителем. Поскольку отклик автомобиля на работу органов рулевого управления меняется с изменением скорости автомобиля и дорожными условиями, его поведение при перемещении рулевого управления трудно предсказать как в отношении времени, так и в отношении направления.
Эти трудности могут быть преодолены при использовании рулевого привода на четыре колеса (4WS). В 1988 году две компании — производители автомобилей, Хонда и Мазда, объявили об установке привода 4WS на некоторые из своих моделей.
Преимущества привода 4WS
По сравнению с обычным приводом рулевого управления на два колеса, привод 4WS, как заявляют изготовители, имеет следующие преимущества:
1. Превосходную стабильность на поворотах.
2. Улучшенный отклик рулевого управления и точность его работы.
3. Заметное улучшение при быстром маневрировании на узкой извилистой дороге.
4. Меньший радиус поворота и более «компактное» маневрирование при низких скоростях движения автомобиля.
Относительные углы поворота колес
Направление, в котором поворачиваются при управлении задние колеса по отношению к передним колесам, зависит от условий движения.
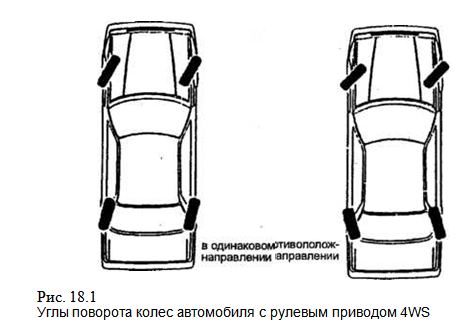
При маневрировании с низкой скоростью движения перемещение колес отчетливо выражено, поэтому задние колеса поворачиваются в противоположном направлении, это облегчает управление автомобилем, например, при его парковке в ограниченном пространстве (рис. 18.1). Поскольку обычно задние колеса делаются таким образом, чтобы они следовали по колее, проложенной передними колесами, задний привод управления автомобилей 4WS не включается в обычных ситуациях.
При высокой скорости движения, когда перемещение рулевого колеса незначительно, передние и задние колеса поворачиваются в одном направлении. Это вынуждает автомобиль двигаться скорее подобно крабу, чем перемещаться по изогнутому пути, такая особенность дает преимущества в тех случаях, когда автомобиль разворачивается на высокоскоростной дороге. Исключение центробежного эффекта и, как следствие, уменьшение крена кузова и действия поворачивающего усилия на рулевое колесо улучшает стабильность движения автомобиля и делает управление им проще и безопаснее.
- ГРУЗОВОЙ ПРИЦЕП ММЗ-81021
- Цвет провода автомобиля
- Электрическая масса автомобиля
- Проверка и регулировка зазоров в клапанном механизме двигателя
- Проверка герметичности системы питания двигателя
- Продольный наклоны шкворня
- Измерение компрессии в цилиндрах
- Диоды в генераторе автомобиля
- Современные нормы светораспределения головных фар
- Методы проверки электронных систем зажигания
- Установка опережения впрыска на дизеле
- Рулевое управление аккермана
- СКЛАДНЫЕ ПРИЦЕПЫ-ПАЛАТКИ
- Диагностика освещения и световой сигнализации
- Составные части прицепа-палатки
 Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...
Lorem Ipsum has been the industry's standard dummy text ever since the 1500s...